 This work develops planning and control algorithms for autonomous navigation of ground vehicle on arbitrary rough terrains. The approach is based on global stochastic optimization and local optimal control of trajectories simulated using high-fidelity physics engine. The system is currently being deployed on a small-scale ground vehicle at JHU.
This work develops planning and control algorithms for autonomous navigation of ground vehicle on arbitrary rough terrains. The approach is based on global stochastic optimization and local optimal control of trajectories simulated using high-fidelity physics engine. The system is currently being deployed on a small-scale ground vehicle at JHU.
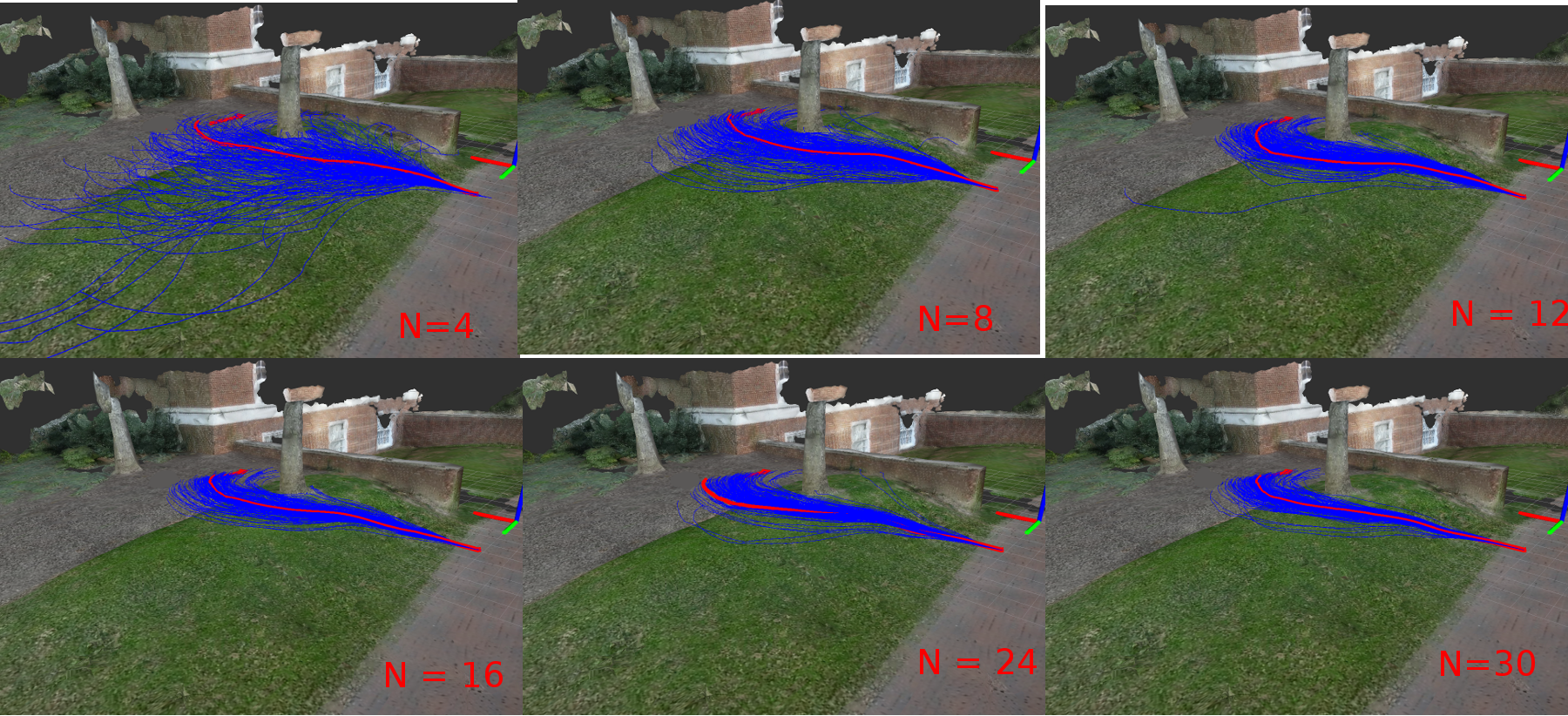
Multi-body Dynamics Stochastic Optimization

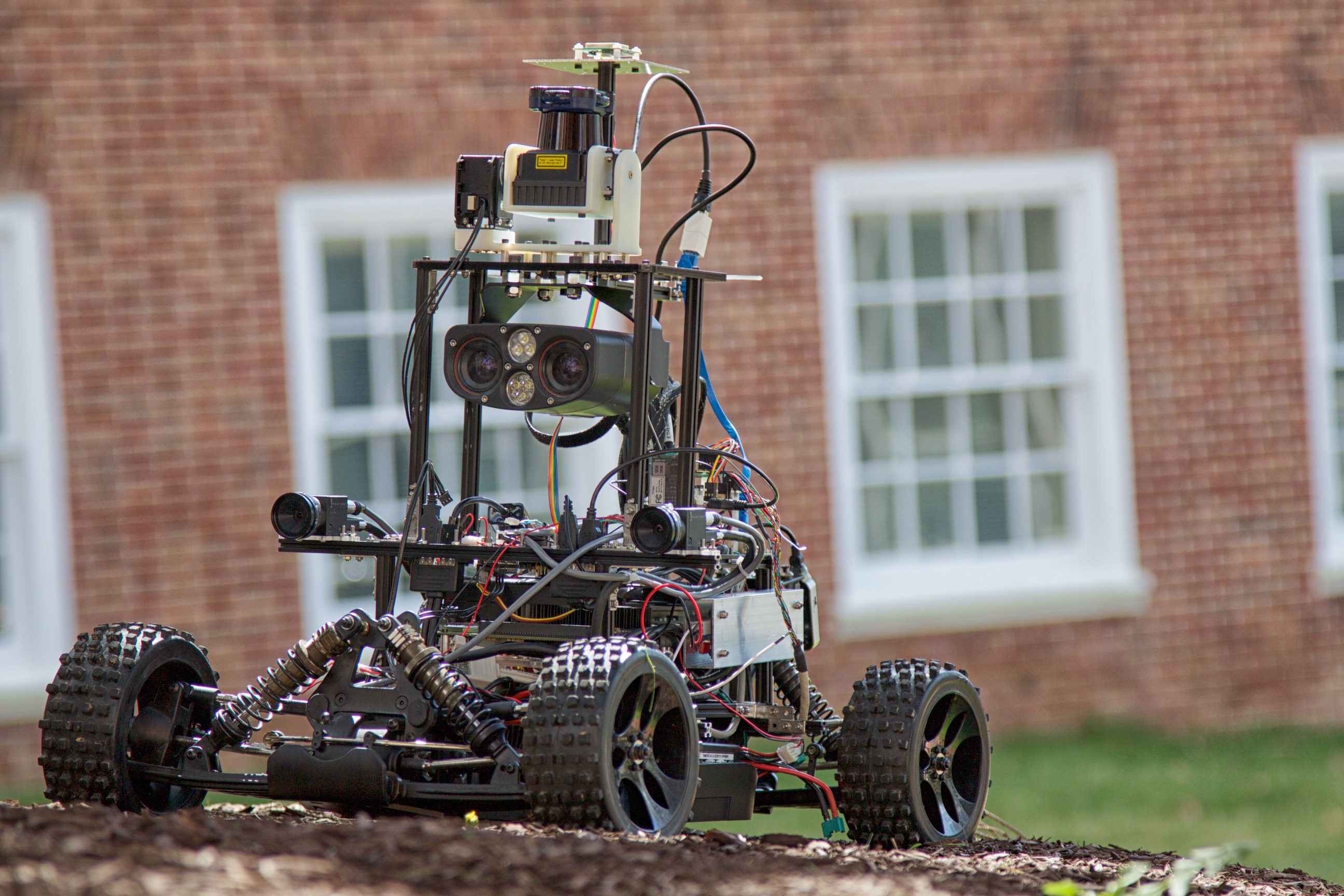
JHU UGV traversing rough terrain