 | Ascending Technologies Pelican UAV Uses: navigation and control algorithms, air quality sampling, imaging |
 | Pick-and-place UAV Uses: grasping objects up to 250 grams |
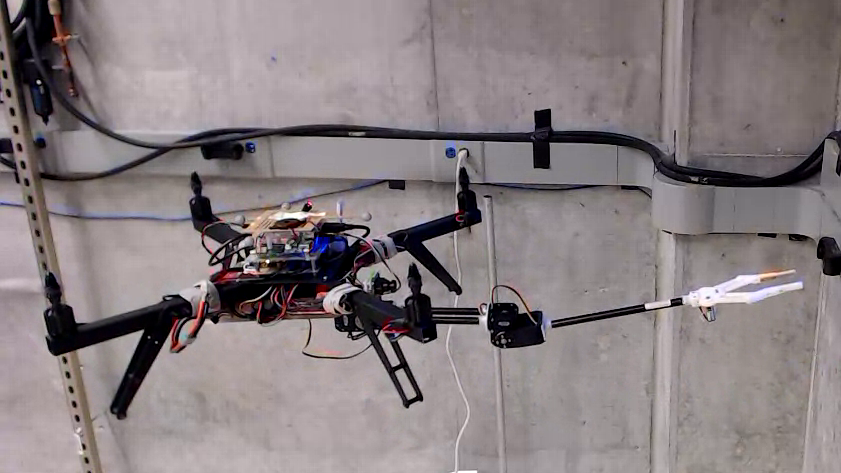
 | AirGripper UAV Uses: manipulation of objects up to 1 kg |
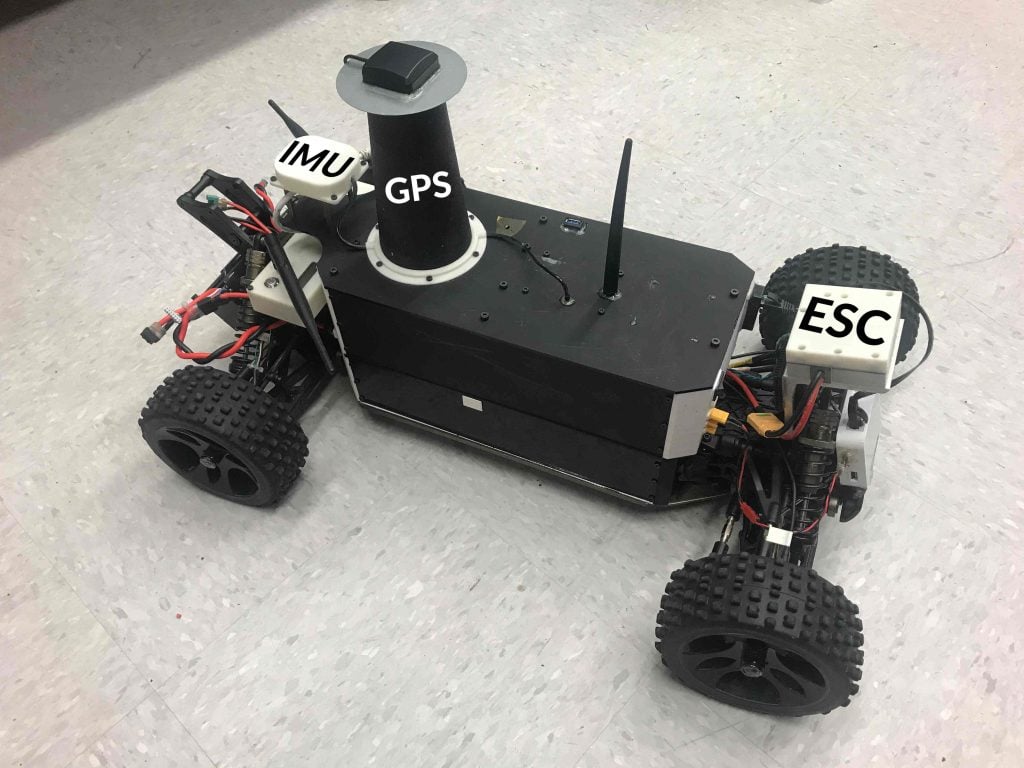 | Rough-terrain model UGV Uses: development of rough-terrain visual-inertial navigation and control algorithms |
 | Iver3 AUV (shared with DSCL directed by Prof. Louis Whitcomb) Uses: adaptive sampling for environment monitoring |
 | JHU USV Uses: adaptive sampling for environmental sensing and monitoring |
 | Cubesat ProxOps Testbed Uses: development of perception and control autonomy algorithms for proximity operations |
 | Other custom UAVs |