In this work, Adaptive Model Predictive Control Techniques are used to estimate the parameters for a Nonlinear Quadrotor Model and perform safe maneuvers to avoid obstacles. The parameters considered in the nonlinear model account for the thrust gain, body external forces, and PID gains for controlling Euler angles (roll, pitch, and yaw). These parameters are continually estimated, thereby accounting for decreasing battery voltage and time-varying external forces. The nonlinear model is then used to predict safe trajectories around obstacles. These trajectories explicitly take into account the uncertainty in the state space resulting from parameter uncertainty.
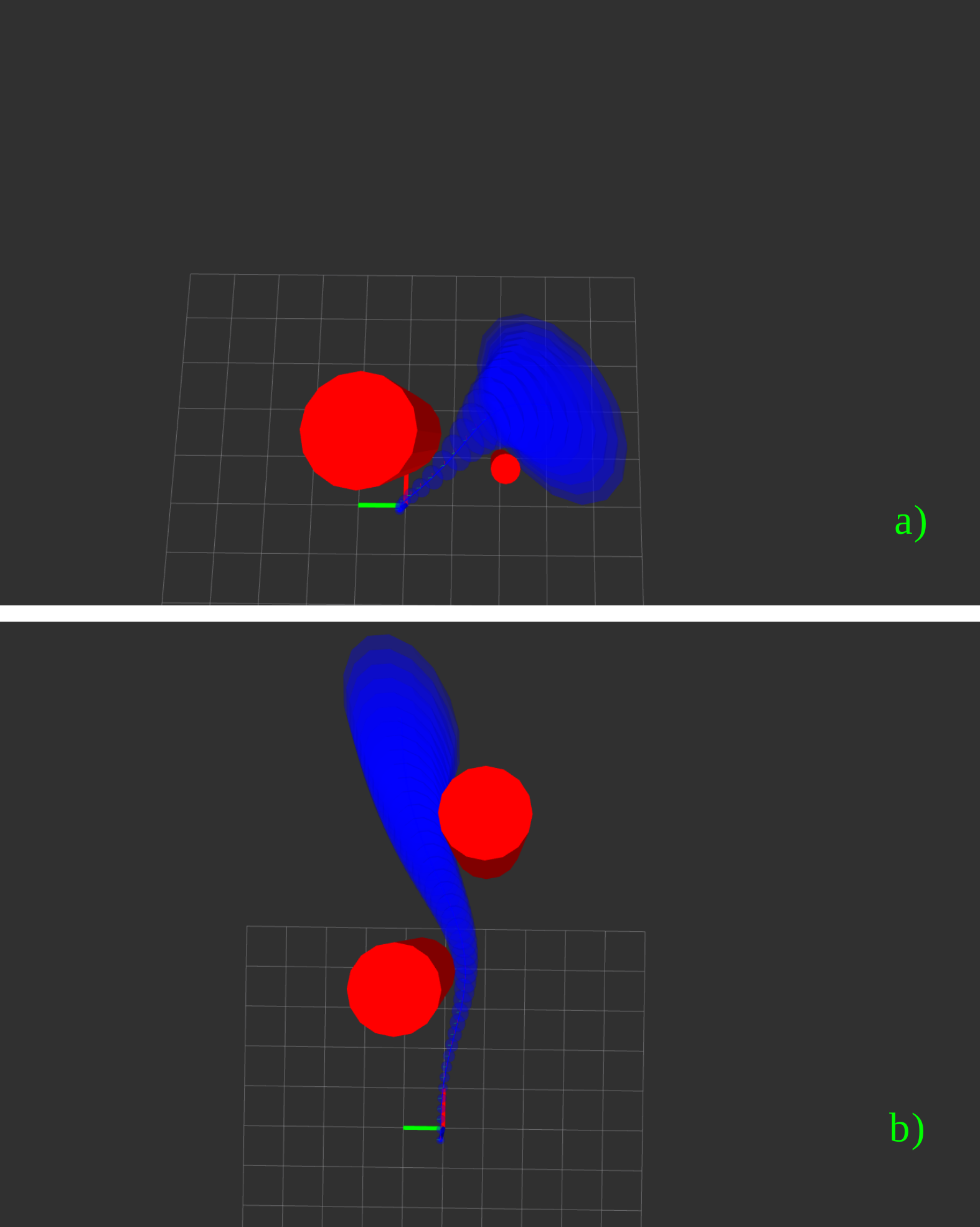
Adaptive Model Predictive Control Based Trajectories for Quadrotor Avoiding Obstacles: a) Scene 1 : Trajectory (with convariance) for avoiding two obstacles while moving at 2 m/s b) Scene 2: Trajectory planned for avoiding two obstacles while moving at 5 m/s
Nonlinear Model Predictive Control (NMPC) techniques are applied on the nonlinear model to predict safe trajectories around obstacles. These trajectories explicitly take into account the uncertainty in the state space while planning for trajectories around obstacles. NMPC also achieves a user specified desired goal state and minimizes control effort during planning.
The video below shows the obstacle avoidance of a pole at 4 meters per second. The obstacle is detected at a distance of 3 meters away and a trajectory is planned on-the-fly to avoid the obstacle. The onboard video shows a green dot for the center of the obstacle. When the distance to the obstacle is within a threshold, the quadrotor follows the computed MPC trajectory in an open-loop fashion.