Towards Autonomous Eye Surgery by Combining Deep Imitation Learning with Optimal Control
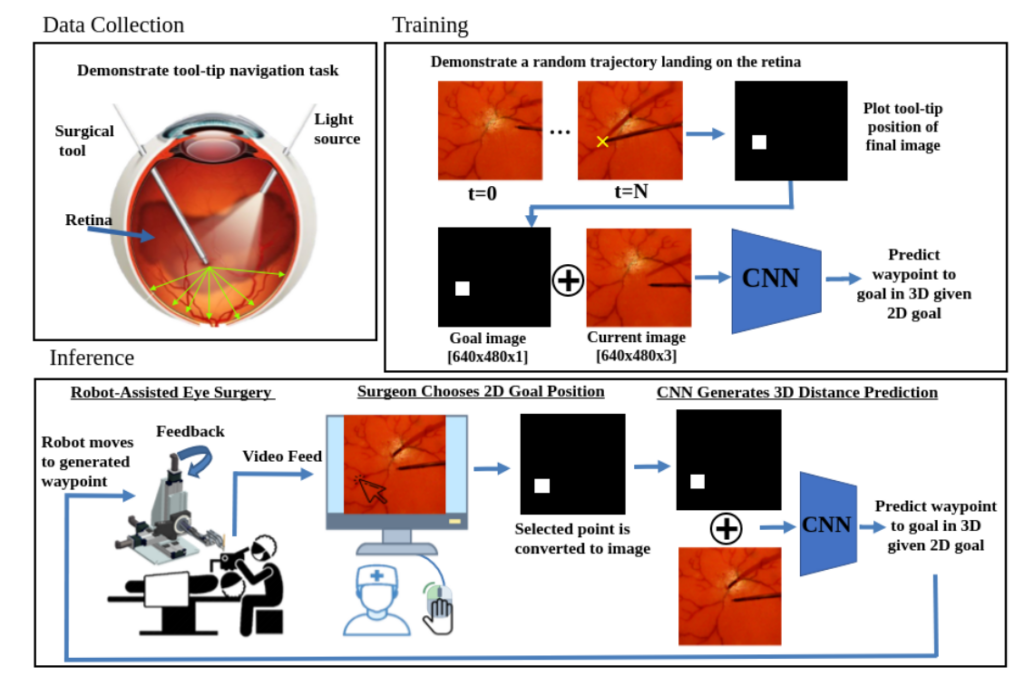
A fundamental challenge in retinal surgery is safely navigating a surgical tool to a desired goal position on the retinal surface while avoiding damage to surrounding tissues, a procedure that typically requires tens-of-microns accuracy. In practice, the surgeon relies on depth-estimation skills to localize the tool-tip with respect to the retina and perform the tool navigation task, which can be prone to human error. To alleviate such uncertainty, prior work has introduced ways to assist the surgeon by estimating the tool-tip distance to the retina and providing haptic or auditory feedback. However, automating the tool-navigation task itself remains unsolved and largely unexplored. Such a capability, if reliably automated, could serve as a building block to streamline complex procedures and reduce the chance for tissue damage. Towards this end, we propose to automate the tool-navigation task by mimicking the perception action feedback loop of an expert surgeon. Specifically, a deep network is trained to imitate expert trajectories toward various locations on the retina based on recorded visual servoing to a given goal specified by the user. The proposed autonomous navigation system is evaluated in simulation and in real-life experiments using a silicone eye phantom. We show that the network can reliably navigate a surgical tool to various desired locations within 137 µm accuracy in phantom experiments and 94 µm in simulation, and generalizes well to unseen situations such as in the presence of auxiliary surgical tools, variable eye backgrounds, and brightness conditions.
J. W. Kim et al., “Autonomously Navigating a Surgical Tool Inside the Eye by Learning from Demonstration,” 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 2020, pp. 7351-7357, doi: 10.1109/ICRA40945.2020.9196537. (pdf)