Being able to sense and localize abnormalities in an aquatic environment efficiently and quickly is crucial for both the environmental scientists and government authorities to study the problem and take remediation measures. Conventional, statically-deployed buoy stations can only provide a sparse, low-resolution snap shoots of the environmental parameters of interest within a predefined area. Data interpolation between the stations, and extrapolation outside the area introduce estimation errors at best, and for the worst case, completely miss the environmental abnormality.
This research explores the use of autonomous underwater vehicles (AUVs) and autonomous surface vessels (ASVs) equipped with sensors to construct water quality models to aid in the assessment of important environmental hazards, for instance related to point-source pollutants or localized hypoxic regions. Our focus is on problems requiring the autonomous discovery and dense sampling of critical areas of interest in real-time, for which standard (e.g. grid-based) strategies are not practical due to power and computing constraints which limit mission duration. To this end, we consider adaptive sampling strategies on Gaussian process (GP) stochastic models of the measured scalar field in order to focus sampling on the most promising and informative regions. Specifically, this work employs the GP upper confidence bound (GP-UCB) as the optimization criteria to adaptively plan sampling paths that balance a trade-off between exploration and exploitation. Two informative path planning algorithms based on (i) branch and bound techniques and (ii) cross-entropy optimization are implemented for choosing future sampling locations while considering the motion constraints of the sampling platform.
The effectiveness of the proposed methods are explored in simulated scalar fields for identifying multiple regions of interest within a 3D environment. Field experiments with both an AUV and an ASV using both virtual measurements on a known scalar field and in situ dissolved oxygen measurements for studying hypoxic zones validate the approach’s capability to quickly explore the given area, and then subsequently increase the sampling density around regions of interest without sacrificing model fidelity of the full sampling area.
Simulations / Field Experiments with Autonomous Underwater Vehicle (AUV)
Simulation Examples
Simulation of Gaussian process adaptive sampling with AUV in RVIZ.

Example trajectories for branch and bound informative path planning (left), cross entropy informative path planning (center), and a baseline undulating lawnmower (right) within a 3D environment. Desired regions of interest for data collection are shown in yellow.
Field Experiments
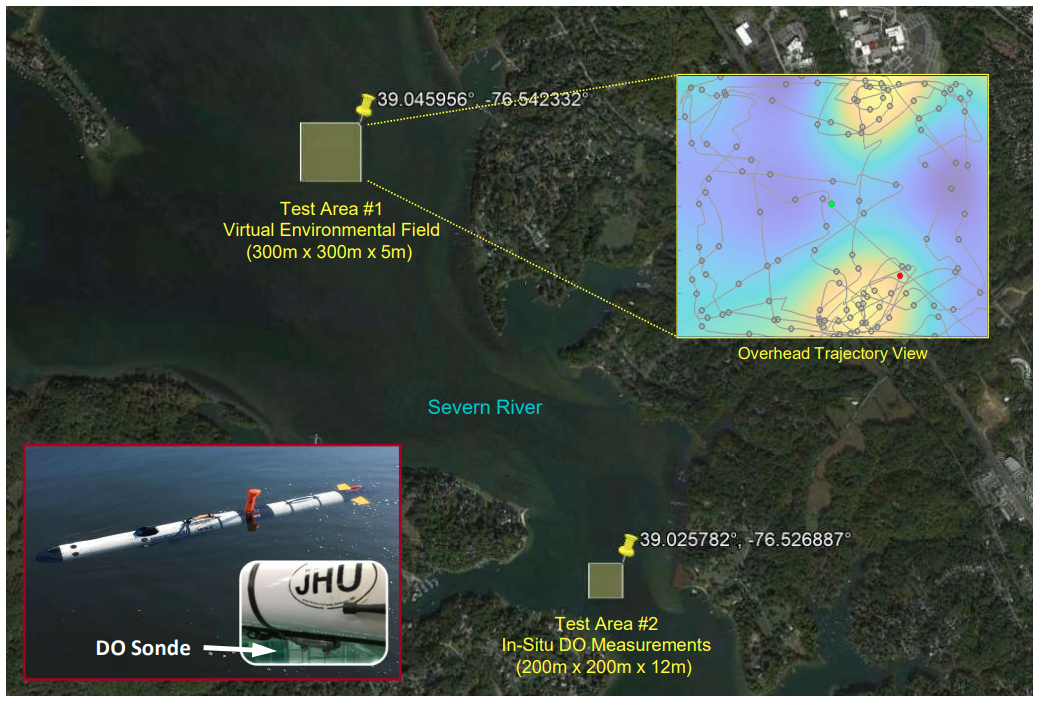
AUV field experiments were conducted in the Severn River, Maryland. The northernmost test area ran the GPAS algorithm using virtual measurements a simulated environmental field with multiple ROIs. The southernmost test area ran the GPAS algorithm using in situ dissolved oxygen measurements. The Iver3 AUV platform is shown in the bottom left.
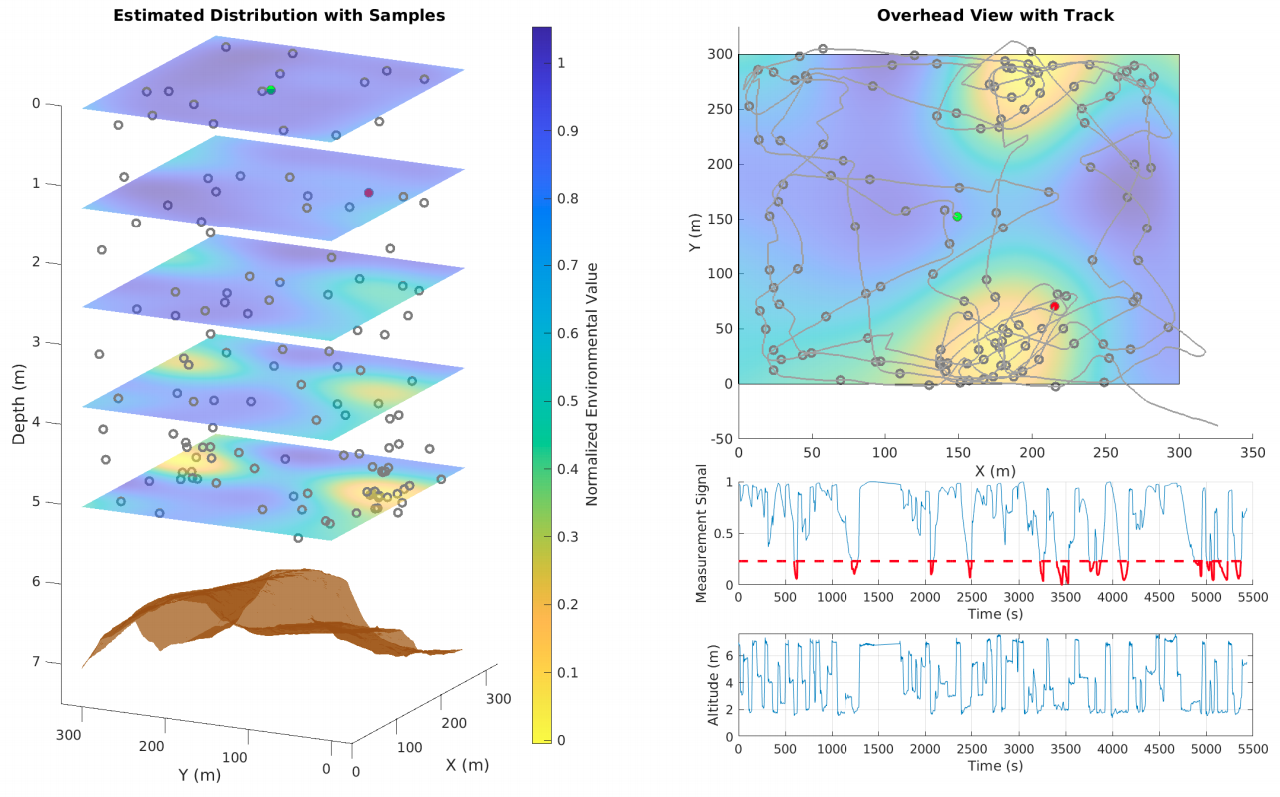
Results for the field experiment performed in northern test area using a virtual environmental distribution. The left image shows the estimated GP model with sampling points in 3D. The measured bathymetry of the test area shown in brown. The top right plot shows a bird’s-eye view of the AUV trajectory with the estimated distribution at the seafloor. The time series plots in the bottom right show the normalized virtual measurements, where measurements within an ROI are highlighted in red, and the vehicle altitude.
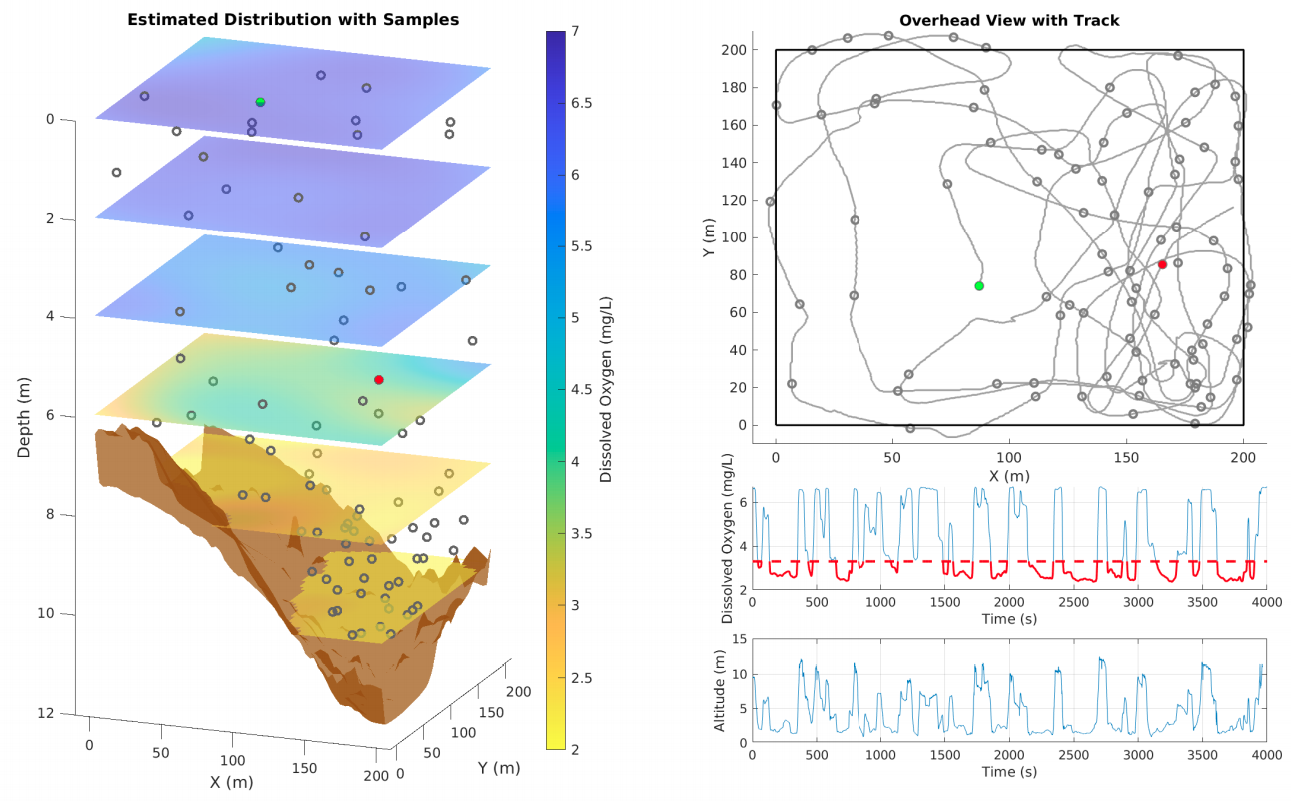 Results for the field experiment performed in southern test area using in situ dissolved oxygen measurements. The left image shows the estimated GP model with sampling points in 3D. The measured bathymetry of the test area shown in brown. The top right plot shows a bird’s-eye view of the AUV trajectory. The time series plots in the bottom right show the DO measurements, where measurements below the normalized ROI range (22nd percentile) are highlighted in red, and the vehicle altitude.
Results for the field experiment performed in southern test area using in situ dissolved oxygen measurements. The left image shows the estimated GP model with sampling points in 3D. The measured bathymetry of the test area shown in brown. The top right plot shows a bird’s-eye view of the AUV trajectory. The time series plots in the bottom right show the DO measurements, where measurements below the normalized ROI range (22nd percentile) are highlighted in red, and the vehicle altitude.
Field Experiment with Autonomous Surface Vehicle (ASV)
Initial work also integrated and deployed the algorithm on an ASV. The system was validated by mapping adaptively a coastal region and demonstrating that the vehicle can quickly explore the environment and subsequently focus on the more “interesting” parts of the field being estimated. We performed field validation using an ASV over a small area with interesting topography. Bathymetry measurements were used for representing the field and the goal was to quickly discover the deepest part of the area of interest, as a surrogate for e.g. the extremal concentration of a pollutant in the environment.
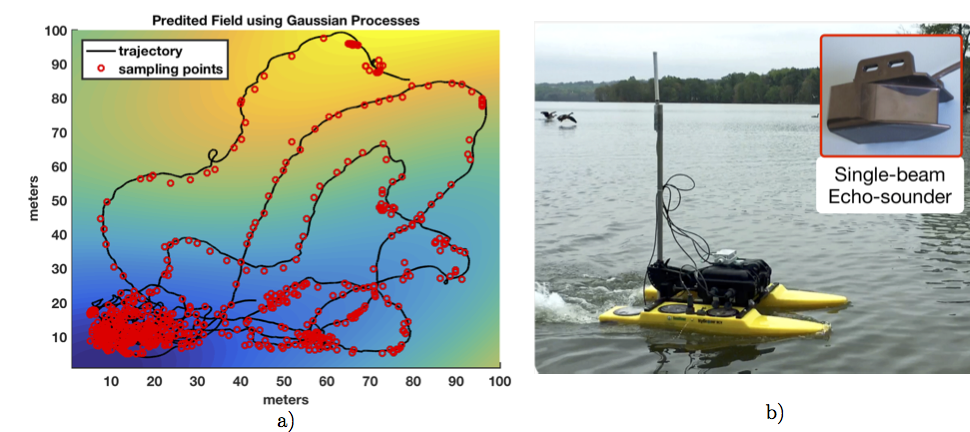
Adaptive sampling path (a) computed and executed on-board the JHU ASV (b) using bathymetry as a surrogate for concentration measurements.
JHU ASV in performing adaptive sampling at Loch Raven reservoir, MD.